


AVOMNI
Flotte de robots mobiles et Asservissement visuel
Le projet
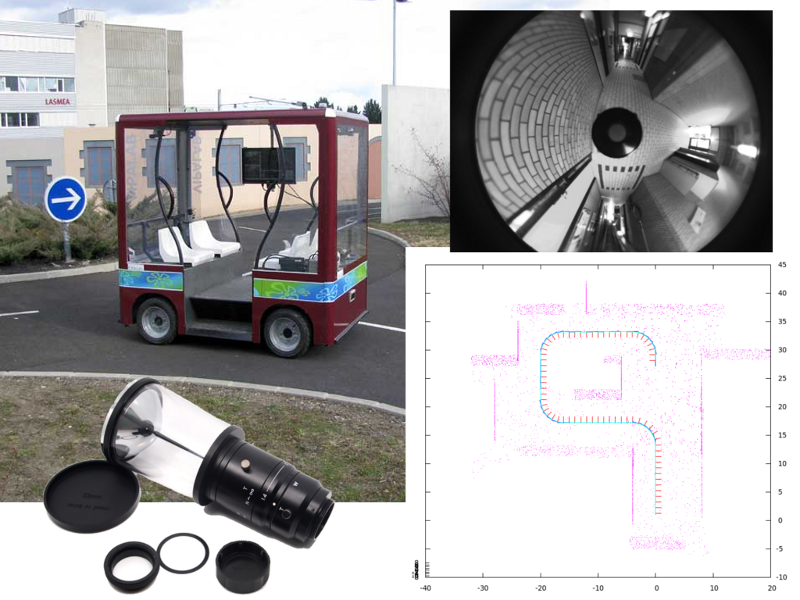
Le projet AVOMNI propose de s’intéresser à la commande et à la navigation de flottes de robots mobiles et manipulateurs grâce à l’utilisation de différents capteurs mais sans faire appel à des estimations 3D.
Pour cela, l’utilisation des informations capteurs en se basant sur de la Commande Référencée Capteur sera privilégiée.
Ainsi, 2 objectifs principaux ont été fixés :
- Etre capable de faire se regrouper plusieurs robots selon une configuration donnée et de les garder groupés : travail sur la commande
- Etre capable de créer des cartes qui permettront la navigation des robots : travail sur la perception et la planification de trajectoires.
Si ce projet parvient à remplir ses objectifs, alors les résultats obtenus pourront permettre de reconfigurer et/ou d’adapter des flottes de robots pour des systèmes de transport, voire des systèmes de production mobiles.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |     |
| Mots clés du projet : | flottelocalisationrobotique-mobilecollaboratifcommande-référencée-capteurs |
| Budget | |
| Aide | |
| LABEX IMobS3 | 2011-2013 |
Pôle chef de file
Porteur
du projet
LabEX IMobS3 / Institut Pascal
Coordonnées du contact
Marché(s) cible associé(s)

Intralogistique industrielle
Mobilité en sites privés
Intralogistique industrielle
Mobilité en sites privés





