


C3BOTS
Collaborative Cross and Carry roBots : Conception modulaire de robots agiles et collaboratifs pour le transport en tout-terrain
Le projet
Le projet C3Bots s’intéresse aux robots mobiles en environnement faiblement structuré, de type tout-terrain (champ agricole, zone forestière) ou industriel (chantier, usine).
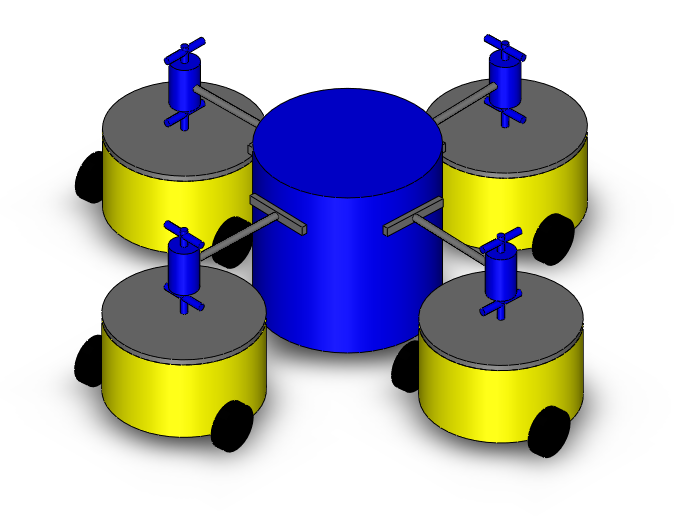
L’objectif du projet C3Bots est de concevoir et de commander des robots mobiles élémentaires, nommés mono-robots, dotés de structures et cinématiques simples. Ces mono-robots peuvent interagir et s’interconnecter afin de former un robot plus complexe appelé poly-robot assurant des fonctions supplémentaires telles que : la manipulation et transport d’objets sur tous types de terrains (tâche dite « du déménageur »), le franchissement d’obstacles et enfin la reconfiguration structurale (ajustement des mono-robots en nombre et disposition selon la forme et le poids de l’objet à manipuler). Ainsi, le projet C3Bots propose un concept très innovant de robots mobiles agiles et collaboratifs. Les applications envisagées vont de l’agriculture à la logistique, en passant par l’intervention d’urgence en milieux hostiles ou les chantiers de construction.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |    |
| Mots clés du projet : | collaboratifrobotique-mobilemanipulationcoopératifcommandeagilereconfigurable |
| Budget | |
| Aide | |
| LABEX IMobS3 | 2011-2013 |
Pôle chef de file
Porteur
du projet
LabEX IMobS3 / Institut Pascal
Coordonnées du contact
Marché(s) cible associé(s)

Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Exploitation de la forêt et transformation du bois
Equipement pour les travaux publics et solutions de construction
Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Exploitation de la forêt et transformation du bois
Equipement pour les travaux publics et solutions de construction





