

CraFT
Calcul de trajectoires de robot pour la Fabrication additive de Tubulures complexes
Le projet
Les outils de fabrication additive sont régulièrement installés sur des robots ; cela est poussé par le besoin de réaliser des pièces de grandes dimensions. Toutefois, le comportement du robot peut générer un défaut sur la pièce fabriquée. En effet, c'est le comportement cinématique du robot qui impose la vitesse de déplacement de la torche par rapport à la pièce.
Ainsi, un des enjeux industriels actuels est le développement de solution de calcul de trajectoires pilotées au robot pour la fabrication additive permettant la maîtrise de la vitesse de déplacement de la torche. A l'heure actuelle, les trajectoires définissant le mouvement des outils de fabrication sont calculées en fonction des caractéristiques géométriques et d’état de surface de la pièce à produire. Toutefois, cette trajectoire est une solution possible permettant la fabrication de la pièce, mais n'est pas forcément l'optimum en terme de sollicitation cinématique du robot et de qualité de la pièce obtenue.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |   |
Partenaires PME, TPE, ETI : |   |
Co-financeur(s) : |  |
| Mots clés du projet : | robotoptimisationWAAMgénération-de-trajectoires |
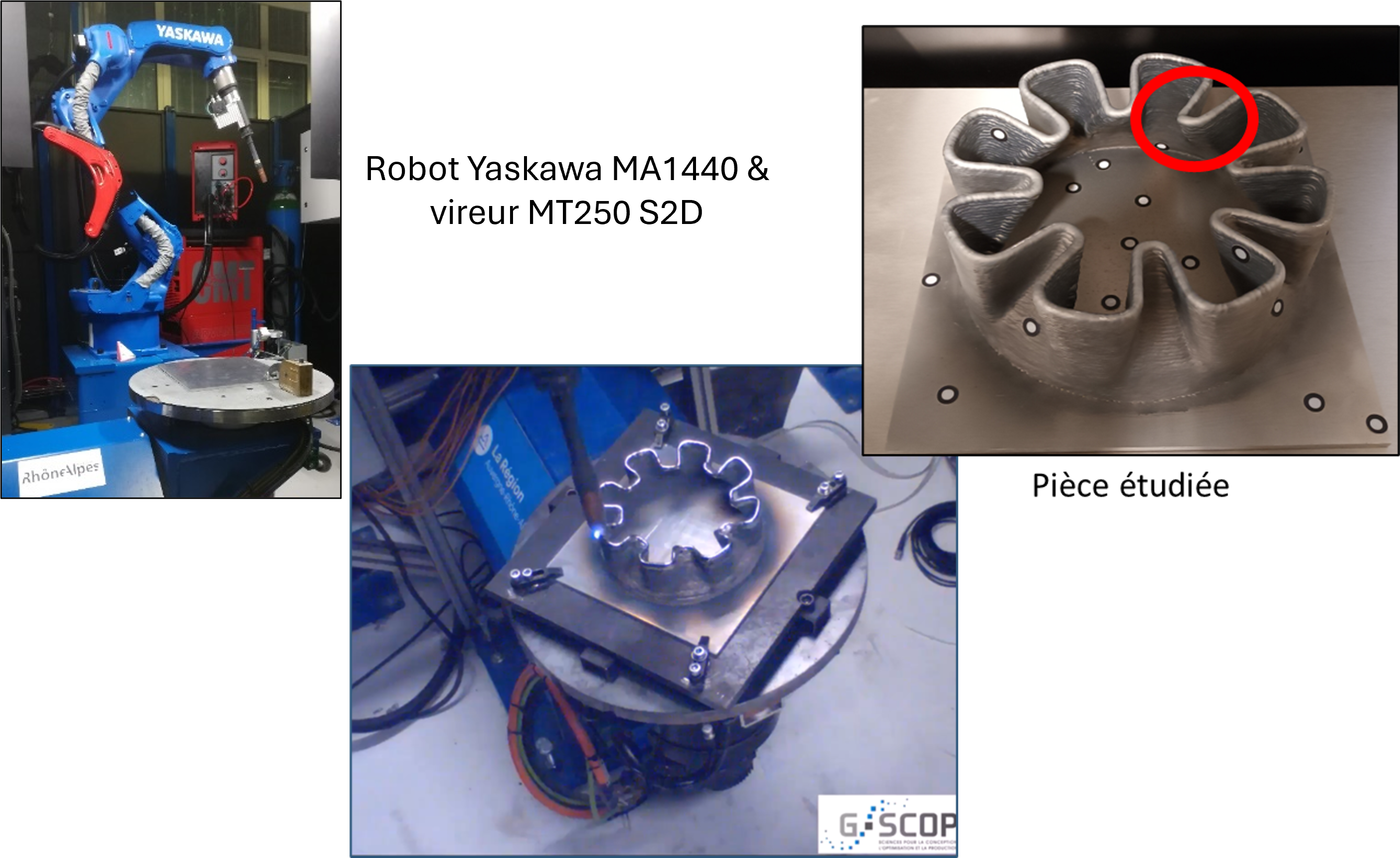
Crédit photo: Sigma Clermont
| Budget | |
| Aide | |
| Pack Ambition Recherche | 2021-2025 |
Pôle chef de file
Porteur
du projet
Institut Pascal
Coordonnées du contact
Marché(s) cible associé(s)
")
Sous-ensembles de structures (aéro...)
Sous-ensembles de structures (aéro...)





