

iPICK3D
Picking Pièces Intelligent
Le projet
La robotique collaborative transforme notre façon de penser la production. Ces robots nouvelle génération peuvent être facilement manipulés par des opérateurs de production, les dotant d'un assistant de production.
Cette nouvelle approche contribue à diminuer la pénibilité au travail en réduisant les tâches répétitives ayant peu de valeur ajoutée ainsi que les tâches traumatiques physiquement (réduction des TMS) L'opérateur de production peut alors réaliser des tâches nécessitant un savoir-faire et une créativité humaine, tout en assurant une cadence de production. La préhension d'objets pour assemblage de pièces ou pour dévracage est une tâche hautement répétitive et sans valeur ajoutée pour un opérateur.
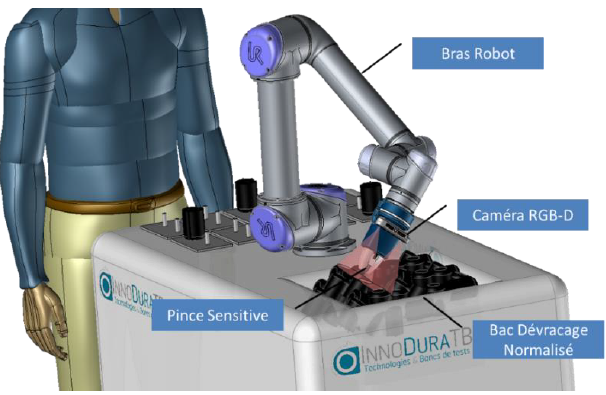
Le projet iPICK3D vise à appliquer les avancées en recomposition 3D ainsi qu’en intelligence artificielle de ces dernières années sur la problématique de préhension d’objets en milieu complexe. Le milieu complexe est défini par :
- Encombrement important (complexité de séparer les objets)
- Occultation (reconstruction 3D partielle des objets)
- Bruit de mesure (reconstructions 3D partiellement aberrantes)
- Environnement non maitrisé (positionnement aléatoire du bac)
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Partenaires R&D, CTI : |
Partenaires PME, TPE, ETI : |  |
Partenaires groupes : |
Co-financeur(s) : |  |
| Budget | |
| Aide | |
| R&D Booster | 2020-2022 |
Pôle chef de file
Porteur
du projet
INNODURA TB
Coordonnées du contact
Marché(s) cible associé(s)

Intralogistique industrielle
Intralogistique industrielle





