


LOCFUS
Localisation décentralisée précise et fiable de véhicules communicants par approche de fusion multi-sensorielle
Le projet
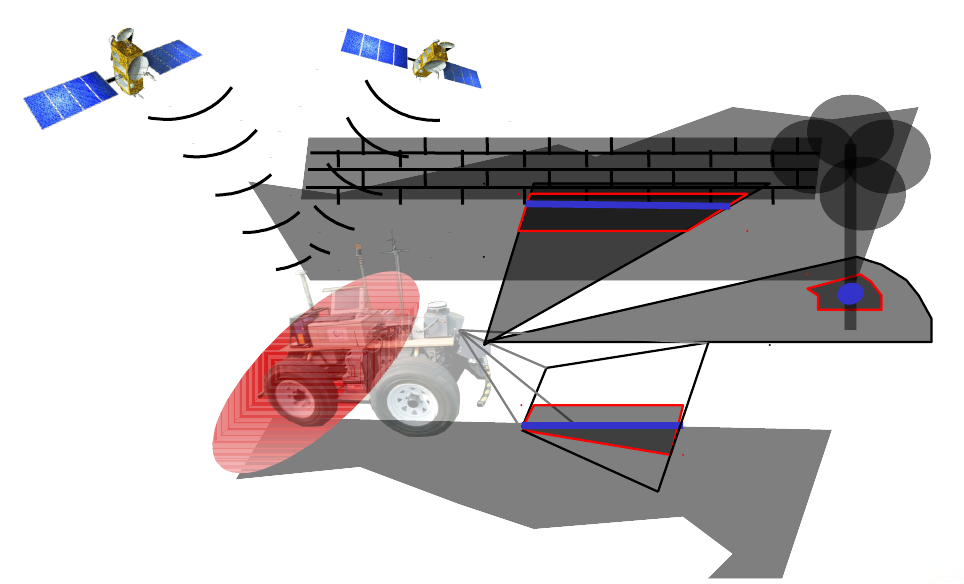
Le projet LOCFUS a pour objectif de contribuer à l’élaboration d’approches de localisation et de perception décentralisée. En effet, aujourd’hui on sait proposer des approches de localisation suffisamment précises et intègres pour un robot. La mise en défaut d’un tel système provient généralement de la perte de données (perte GPS, éblouissement d’une caméra,...) ou de la déconnexion pure et simple de capteurs.
Un moyen de pallier ce type de défauts est le partage des informations sous une forme décentralisée. Ainsi chaque robot a une vue sur la position de l’autre, ce qui peut permettre de traiter les cas évoqués précédemment tout en offrant à chaque véhicule de la flotte la connaissance de la position des autres pour des applications diverses comme le contrôle / commande cohérent de l’ensemble.
Au niveau national ou international, peu d’équipes de recherche proposent finalement des résultats sur des démonstrations réelles avec des robots mobiles en extérieurs. LOCFUS y veillera.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |   |
Partenaires PME, TPE, ETI : |  |
Partenaires groupes : |  |
| Budget | |
| Aide | |
| LABEX IMobS3 | 2011-2013 |
Pôle chef de file
Porteur
du projet
LabeEX IMobS3 / Institut Pascal
Coordonnées du contact
Marché(s) cible associé(s)

Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Mobilité en sites privés
Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Mobilité en sites privés





