


SIMROB
Outil de Simulation pour la robotique mobile
Le projet
La simulation par le temps qu’elle fait gagner et par l’exploration scientifique qu’elle permet est aujourd'hui incontournable. Dans les actions où plusieurs robots doivent coopérer, elle devient indispensable.
Dans le contexte national ou international, on trouve des volontés d'approches de simulation mais aucune ne répond de manière évidente aux besoins conjoints de :
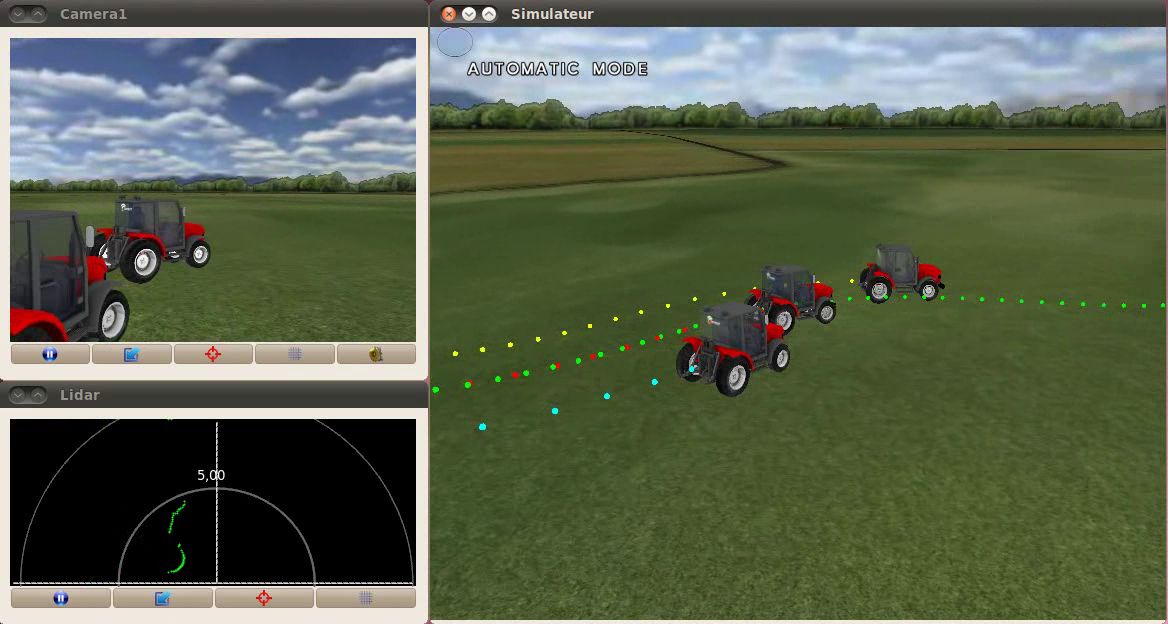
- modélisation de capteurs réalistes ;
- exécution en temps réel garantissant la cohérence spatio-temporelle des données ;
- réalisme de comportement dynamique des robots ;
- gestion du temps optimale et compatible avec les systèmes réels embarqués.
Aussi, le projet SIMROB propose de développer un simulateur qui serait capable de répondre à ces différents besoins et qui à terme, devra devenir un véritable produit industriel, avec des objectifs multiples :
- disposer d'un outil de simulation performant qui s'enrichit de nouveaux capteurs, environnements, véhicules… ;
- proposer des prestations en terme de simulations de scenarii, d'adaptation d'algorithmes en phase de pré-industrialisation ;
- proposer des démonstrations d'algorithmes des laboratoires pour valoriser ces derniers.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |   |
Partenaires PME, TPE, ETI : |  |
| Mots clés du projet : | simulationrobotique-mobilecapteursenvironnementmultiphysique |
Crédit photo: 4D-Virtualiz
| Budget | |
| Aide | |
| LABEX IMobS3 | 2011-2013 |
Pôle chef de file
Porteur
du projet
LABEX IMobS3 / Irstea
Coordonnées du contact
Marché(s) cible associé(s)

Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Mobilité en sites privés
Intralogistique industrielle
Agroéquipements et robotisation de l'agriculture
Mobilité en sites privés





