


ARMS
Séparation de muscles par système robotique multi-bras
Le projet
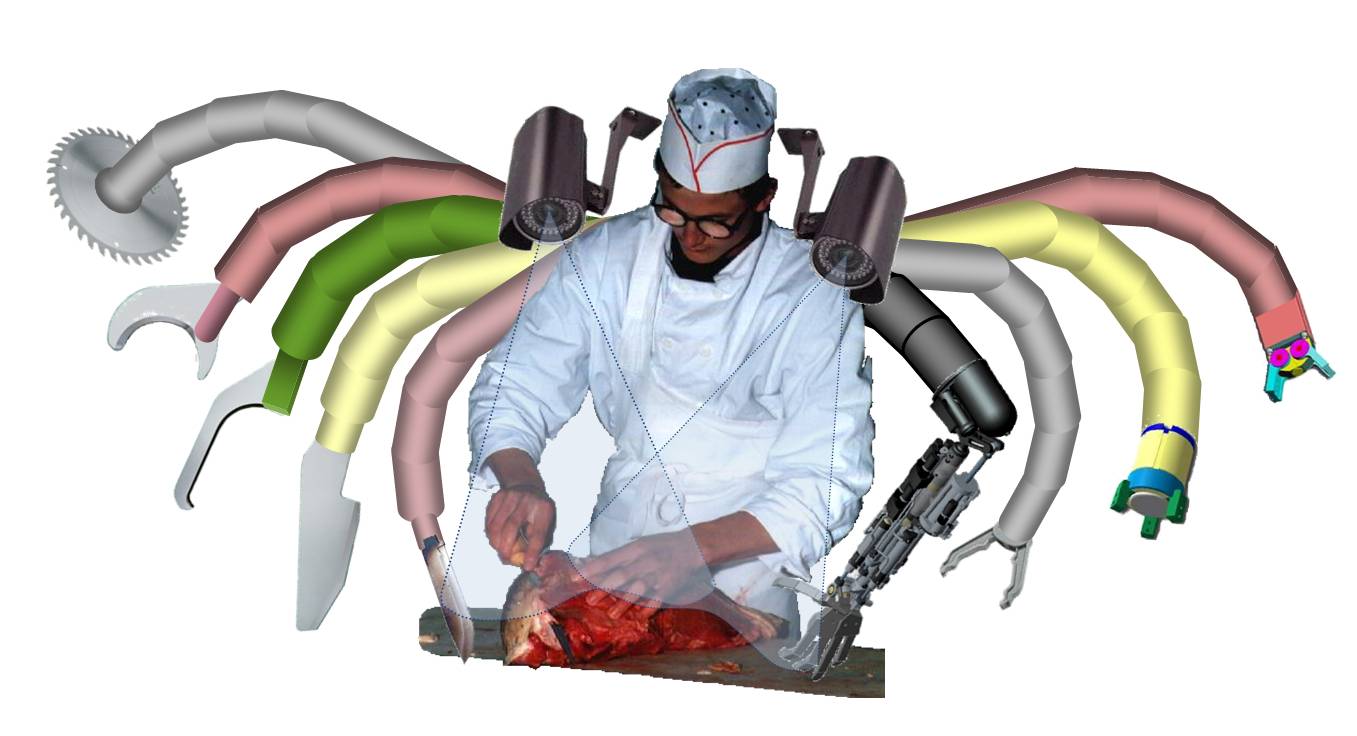
Le projet ARMS propose d’étudier la robotisation de la séparation des muscles de pièces d’une cuisse de bœuf. Un système robotique innovant multi-bras sera utilisé, combinant des méthodes et algorithmes de commande adaptées aux multi-bras, pour permettre de réaliser et contrôler simultanément quatre principales actions mécaniques identifiées (préhension, traction, poussée, et/ou coupe) et appliquées sur trois différentes types d’objets de viande : rigides (os), rigides/articulés (articulation du genou de la cuisse) et déformables (muscles de viande). Des technologies de pointe, comme les capteurs intelligents et la perception active devront être intégrées pour extraire des informations pertinentes. Des algorithmes de suivi d’objets déformables devront renvoyer les données appropriées à l’unité centrale de commande du système. Les systèmes de préhension et de manipulation seront conçus et validés en utilisant la plateforme existante de l’ADIV.
Objectifs et enjeux
Réservé aux abonnés.
Phases du projet
Réservé aux abonnés.
Principaux délivrables
Réservé aux abonnés.
Partenaires R&D, CTI : |    |
Partenaires groupes : |  |
Co-financeur(s) : |
| Budget | |
| Aide | |
| ANR | 2010-2014 |
Porteur
du projet
Institut Pascal
Coordonnées du contact
Pôle(s) co-labellisateur(s)

Marché(s) cible associé(s)

Mécanisation et robotisation de l'industrie agroalimentaire
Mécanisation et robotisation de l'industrie agroalimentaire





